คู่มือการใช้งาน ไม้กั้นทาง BR01
Last updated: 10 มิ.ย. 2563 | 9252 จำนวนผู้เข้าชม |

![]()
คู่มือการใช้งานแลชุดประตูไม้กั้น รุ่น HV-RB01 (Automatic Road Barrier)
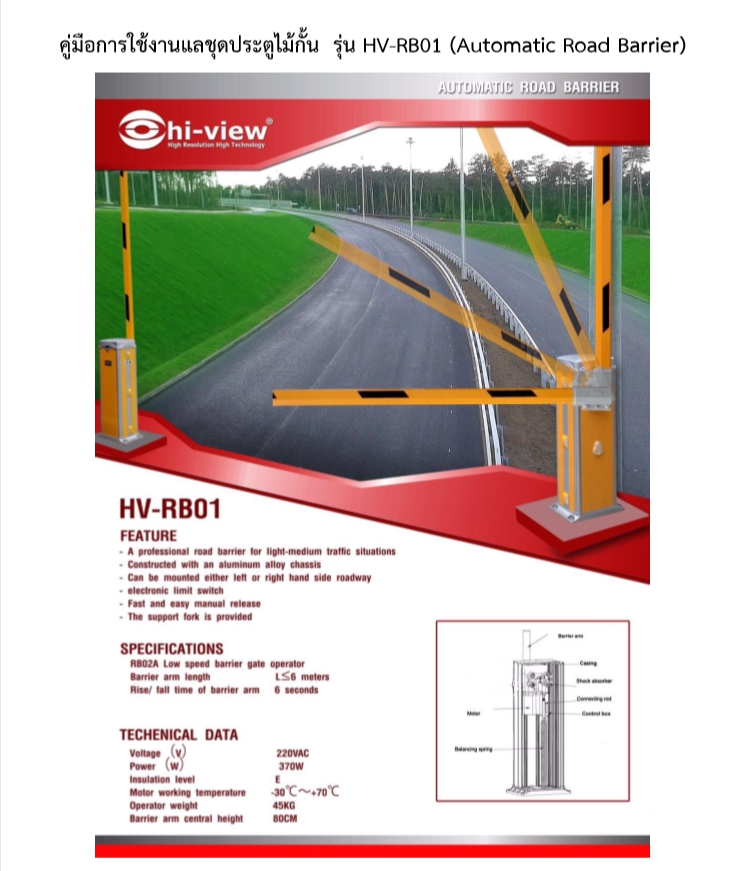
ขอบคุณที่เลือกใช้ RB02A road barrier operator นี่คือโอกาสที่จะทำให้คุณมีวามสุขกับผลติภณัฑข์องเราเพราะความสามารถที่ล้ำหน้า เช่น เทคโนโลยีอัจฉริยะ ปลอดภัยแลติดตั้งและใช้งานง่าย
กฏความปลอดภัย
1) ก่อนเริ่มติดตั้งและใช้งานหรือซ่อมบำรุง ให้ตัดระบบจ่ายไฟฟ้า
2) เพื่อหลีกเลี่ยงจากการบาดเจ็บ ห้ามเปิดประตูหรือฝาครอบบน
3) ใช้ตัวส่งสัญญาณหรือปุ่ม เมื่อคุณสามารถมองเห็นประตูได้อย่างชัดเจนเท่านั้น
4) ไม่แนะนำให้ผู้ใช้งานปรับแก้สายไฟที่ติดตั้งมาจากโรงงาน
5) ตัวเรือนของเครื่องต้องมีระบบป้องกันสายด้วยสายดิน นอกจากนี้ต้องมีการติดตั้งสวิทช์ป้องกันการรั่วไหลของไฟฟ้าด้วย
6) ให้ผู้ที่ไม่มีส่วนเกี่ยวข้องอยู่ห่างจากประตู ห้ามมิให้ผู้ใดเดินตัดผ่านเส้นทางการเคลื่อนที่ของประตู
7) เก็บปุ่มควบคุมอัตโนมัติ รีโมทและอื่นๆ ให้พ้นจากมือเด็ก
8) เมื่อกระแสไฟฟ้าถูกตัด ให้หมุน barrier arm ขึ้นไปในแนวดิ่งด้วยมือผ่านด้ามจับ เพื่อให้ พาหนะ ผ่านไปได้
9) ได้รับการปรับแต่งให้อยู่ในระยะที่ดีที่สุดจากโรงงาน เพื่อให้เหมาะสมกับ balancing spring ห้ามเพิ่มหรือลดความยาวหรือน้ำหนักของ Barrier Arm หากไม่ปฏิบัติตาม อาจทำให้เกิดการเสียสมดุล ก่อนการปรับแต่งใดๆ ต้องแจ้งให้ช่างผู้ชำนาญทราบ
10) ต้องมีผู้ชำนาญการในการติดตั้งอปุกรณ์ป้องกันอินฟาเรดภายนอก (อุปกรณ์ป้องกันอินฟาเรดเป็นอุปกรณ์เสริม)
11) ตัวเลื่อนปรับตำแหน่งถูกปรับให้อยู่ในตำแหน่งที่เหมาะสม ห้ามปรับแต่ง
12) กรุณาอ่านคู่มือเล่มนี้ก่อนการติดตั้ง
คำอธิบาย ด้วยเทคโนโลยีการปรับความเร็วที่ออกแบบมาเป็นอย่างดี ทำให้ RB02A เป็นระบบอัตโนมัตเชิงกลกึ่งไฟฟ้า สำหรับทางเข้า-ออก ในหลายๆแห่ง เราใช้ตัวควบคุมที่ใช้ชิปของ Phillips ซึ่งมีความสามารถสูง อย่างเช่น learning& coding reservoir ทำให้ barrier ทำงานอย่างอัตโนมัติและชาญฉลาดระหว่าง การทำงานและการปรับแต่งรวมถึงการซ่อมบำรุง มือจับสามารถปิดหรือเปิดได้ในกรณีกระแสไฟฟ้าขัดข้อง
คุณลักษณะ
- Voltage: 230VAC
- Power: 370W
- ระดับความเป็นฉนวน E
- อุณหภูมิท างานของมอเตอร์ -30°c~+70°c
- น้ำหนักเครื่อง 45 กิโลกรัม
- ความสูงศูนย์กลางของ Barrier arm 80 เซนติเมตร
- ระยะ Barrier arm 6 เมตร
- ระยะเวลายกตัว/ลงของ Barrier arm 6 วินาที

การติดตั้งแขนซ้าย/ขวา
เครื่องนี้ถูกแบ่งออกเป็นแขนซ้ายและขวา หาก barrier arm อยู่บนฝั่งซ้ายของตัวเครื่องในตำแหน่งปิดและในขณะเดียวกันแขนนี้จะอยู่ด้านใน เมื่อมองจากตัวเครื่อง แขนนี้จะเป็นแขนขวาของ barrier ในทางตรงกันข้ามก็จะเป็นแขนซ้าย กรุณาดูภาพหมายเลข 1-1 ประกอบ แขนขวาสามารถ ติดตั้งเป็นแขนซ้านได้ เมื่อ barrier arm อยู่ด้านนอก เมื่อมองจากเครื่อง

การติดตั้ง
1. เลือกตำแหน่งที่ที่ เพื่อติดตั้งแผ่นฐานของตัวเครื่อง สร้างขาคอนกรีตก่อนในกรณีที่พื้นที่วางไม่ใช่คอนกรีต ยึดแผ่นฐานเครื่องด้วยน็อตที่เตรียม ไว้ให้
2. การติดตั้ง
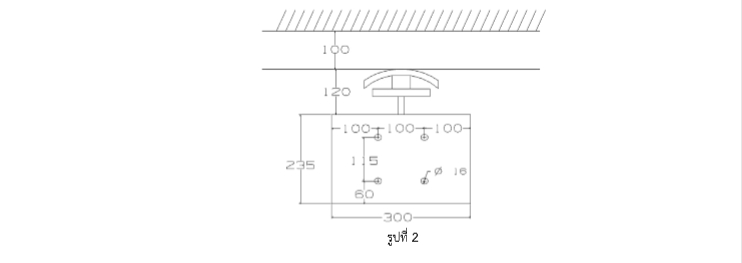
1) วางแผ่นฐานบนตำแหน่งที่เหมาะสม เจาะรูสองรูในตำแหน่งตรงข้ามกัน รูที่ 1 และ 2 ใช้หัวสว่านขนาด 10mm และใช้หัวสว่านขนาด 15mm เพื่อขยายจนกระทั่งได้รูทมี่ีความลึกเพียงพอ กรุณาดูรูปที่ 2
2) พิจารณาตำแหน่งสำหรับการติดตั้งพุก
3) ติดตั้ง barrier casing บนแผ่นฐานและยดึด้วยน็อต ปิดด้วยแผ่นปิดน็อต
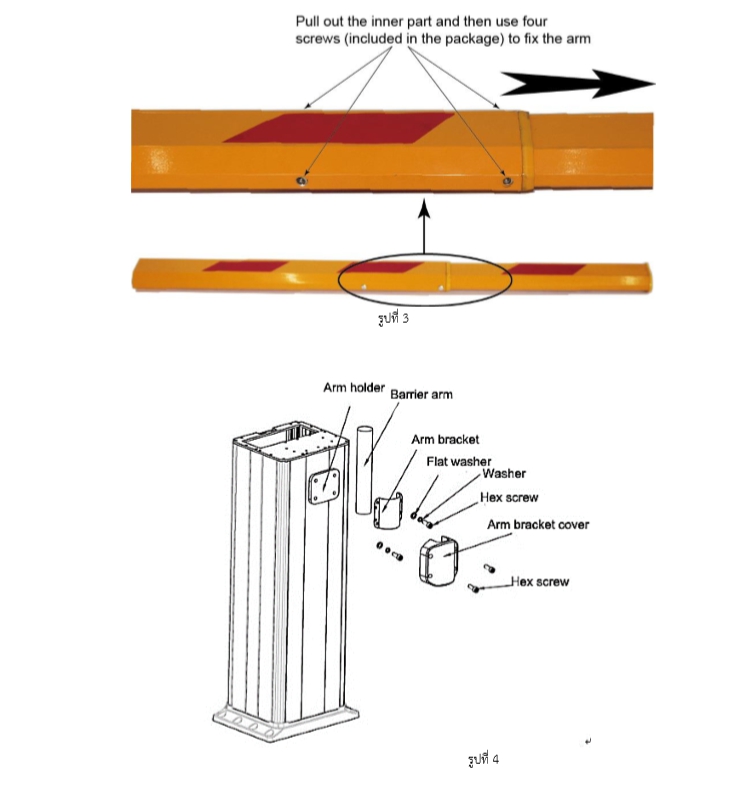
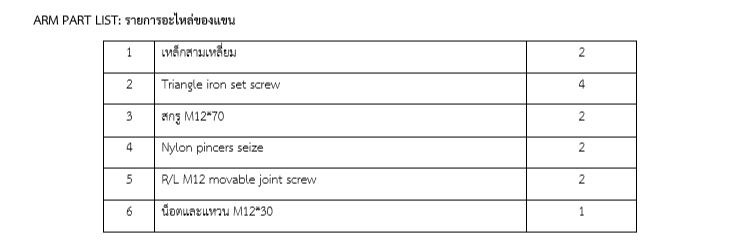
3. การติดตั้ง barrier arm Barrier arm ประกอบด้วยสองส่วน สอดเข้ามาด้านในและยึดด้วยสกรูสี่ตัว (มีมาในชุด) เพื่อยึดแขน กรุณาดูรูปที่ 3 ถอดฝาครอบยึดแขนออกและถอดตัวยึดออก ติดแขนเข้ากับตำแหน่งรับแขนด้วยสกรู ใส่ตัวยึดแขนคืน กรุณาดูรูปที่ 4
ปรับตั้งตำแหน่งจำกัดของ Barrier
ตำแหน่งจำกัดของ barrier ได้รับการปรับตั้งมาจากโรงงาน สามารถปรับตั้งเพิ่มเติมก่อนการใช้งาน (ตัดระบบไฟฟ้าก่อนการปรับแต่ง)
1. Barrier arm ไม่ตั้งฉาก
1) คลายสกรูบนแผ่นแม่เหล็กแนวตั้ง
2) หมุนแผ่นแม่เหล็กแนวตั้งตามเข็มนาฬิกาหรือทวนเข็มนาฬิกาเพื่อปรับตำแหน่งจำกัดในแนวตั้ง กรุณาดูรูปที่ 5
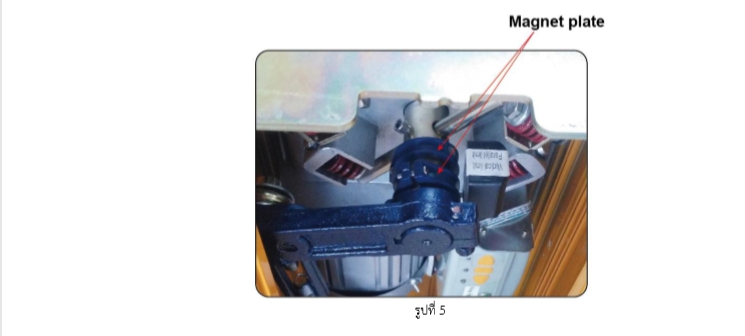
2. Barrier ไม่ขนาน
1) คลายสกรูบนแผ่นแม่เหล็กแนวนอน
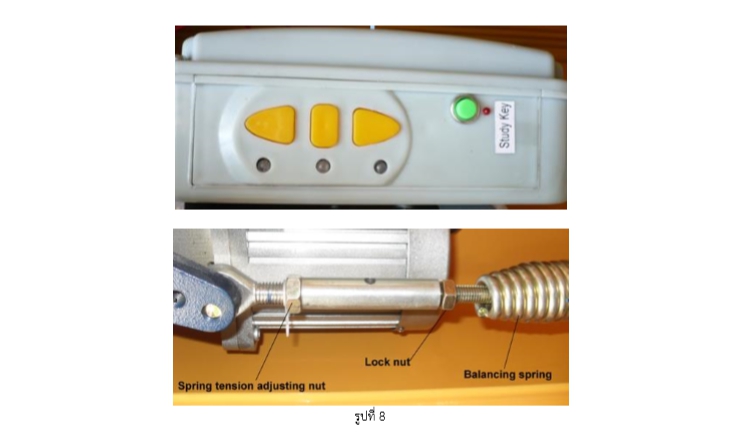
2) หมุนแผ่นแม่เหล็กแนวนอนตามเข็มนาฬิกาหรือทวนเข็มนาฬิกาเพื่อปรับตำแหน่งจำกัดในแนวตั้ง กรุณาดูรูปที่ 5 การทำสมดุลสปริง เพื่อให้การทำสมดุลถูกต้อง แขน Barrier ควรทำมุม 45 องศาและเครื่องต้องถูกปลดล็อค วางแขนในตำแหน่ง 45 องศาก่อนทำสมดุลสปริง คลายน็อตออก หมุมน็อตปรับความตึงของสปริงตามเข็มหรือทวนเข็มนาฬิกา เพื่อเพิ่มหรือลดแรงสปริงเพื่อลดการสั่นและสร้างสมดลุสปริง กรุณาดูรูปที่ 6, 7, 8

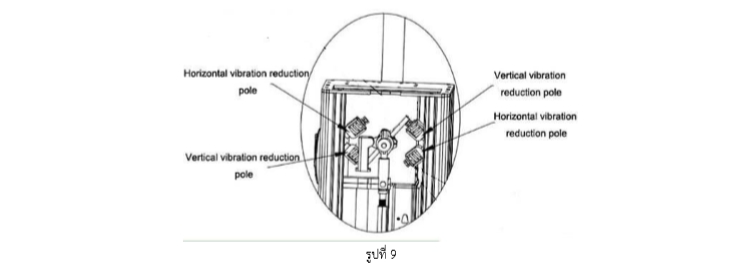
การปรับการสั่นสะเทือนของแขน Barrier ในแนวดิ่งและแนวระดับ
หากการสั่นของแขน barrier สูงผดิปกติเมื่อถึงต าแหน่งในแนวระดับ กรุณาดูขั้นตอนดังต่อไปนี้
1) ยกแขนขึ้นโดยใช้รีโมทหรือมือจับเพื่อจับขึ้นในแนวดิ่ง กรุณาดรููปที่ 9,10,11 ขันน็อตบนแกนลดการสั่นสะเทือนในแนวดิ่งและหมุนน็อตปรับด้านใน ซึ่งสามารถปรับแรงของสปริงที่ติดตั้งที่แกนลดการสั่นสะเทือนในทิศทางทวนเข็มนาฬิกาโดยใช้ประแจ เพื่อที่จะเพิ่มระยะห่างระหว่างหัวของน็อตปรับและสปริง เพื่อเพิ่มแรงสปริง ซึ่งช่วยถ่วงสมดุลผลจากแรงเฉื่อยของแขน barrier เมื่อ barrier หยุดในตำแหน่งแนวระดับ ค่อยปรับใหอ้ยู่ในระดับ ที่เหมาะสม
2) หลังจากปรับเสร็จแล้ว ขันน็อตบนแกนลดการสั่นสะเทือนในแนวระดับให้แน่น
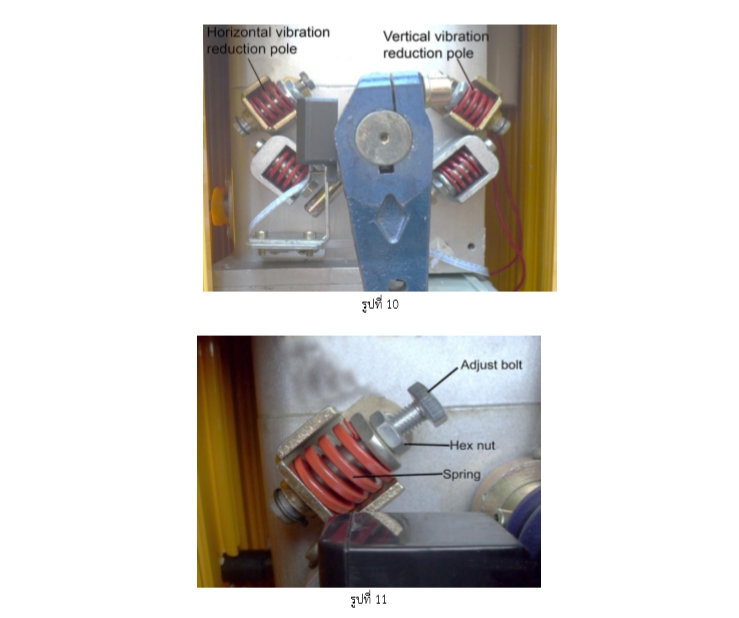
หากหากการสั่นของแขน barrier สูงผิดปกติเมื่อถึงตำแหน่งในแนวดิ่ง คลายน็อตบนแกนลดการสั่นสะเทือนในแนวดิ่งและหมุนน็อตปรับภายในแกนลด การสั่นสะเทือน เหมือนขั้นตอนที่ 1และ2
เปิดหรือปิด BARRIER ด้วยมือ เมื่อคุณต้องการเปิด barrier ด้วยมือในกรณีที่ระบบไฟฟ้าขัดข้องหรือซ่อมบำรุง ปฏิบัติดังต่อไปนี้
- ปลดและถอดฝาครอบบนของเครื่อง
- ถอดแผงหน้าของเครื่อง
- หมุนมือจับตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา เพื่อเปิดหรือปิดเครื่อง กรุณาดูรูปที่ 12
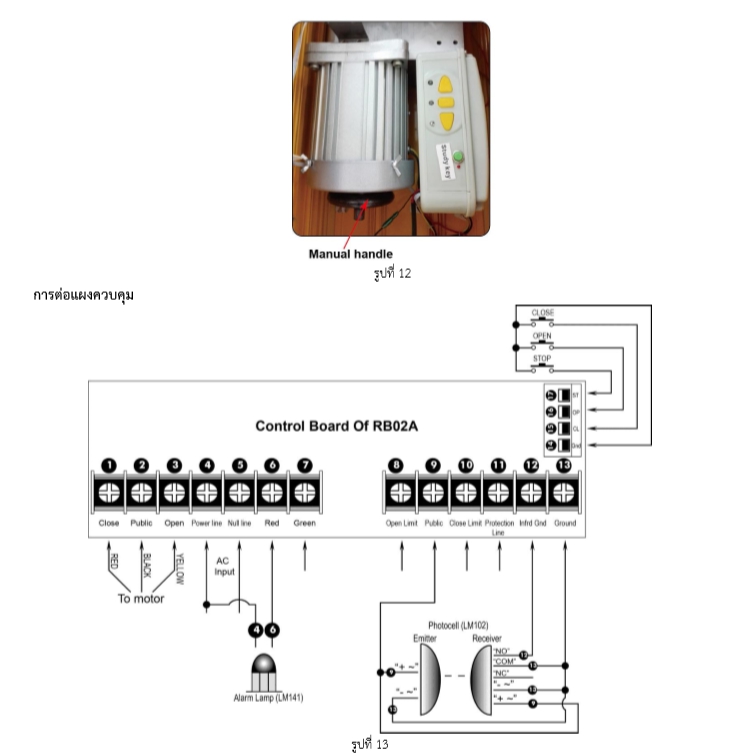
1. มอเตอร์
- สายสีแดงของมอเตอร์ต่อเข้ากับเทอร์มินัล 1
- สายสีดำของมอเตอร์ต่อเข้ากับเทอร์มินัล 2
- สายสีเหลืองของมอเตอร์ต่อเข้ากบัเทอร์มินัล 3
2. ไฟเตือน (อุปกรณ์เสริม)
- สายของไฟเตือนต่อเข้ากับเทอรม์นิัล 4 ส่วนสายอื่นๆต่อเข้ากับเทอร์มินัล 6
3. โฟโตเซลล์ (อุปกรณ์เสริม)
- ใช้สาย 2 คอร์เพื่อต่อเข้ากับเทอร์มินัล +- ของ emitter ของโฟโตเซลล์ที่เทอร์มินัล 9 เทอร์มินัล 13 (ดิน) รวมถึงเทอร์มินัล +- และ -~ ของ receiver ของโฟโตเซล์ต่อเข้ากบัเทอร์มินัล 9 และเทอร์มินลั 13 แบบขนาน
- ใช้สาย 2 คอร์เพื่อต่อเข้ากับเทอร์มินัล COM ของ receiver เข้ากับเทอร์มินัล 13 (ดิน)
4. ปุ่มกด (อุปกรณ์เสริม)
ปุ่มกดแบบสามทางหรือแบบทางเดียวสามารถเชื่อมต่อเข้ากับ barrier การต่อของปุ่มกดแบบสามทางเป็นดังนี้
- ต่อเทอร์มินัลของปุ่มกดเข้ากับเทอร์มินัล 14 (ดิน) เทอร์มินลัปิดเข้ากบัเทอร์มินัล 15 (CL) เทอร์มินลัเปดิเข้ากับเทอร์มินัล 16 (OP) เทอร์มินัลหยดุเข้า กับเทอร์มินัล 17 (ST)
การเชื่อมต่อปุ่มกดแบบทางเดียว
- อย่างแรก คุณต้องพิจารณาว่าคณุต้องการให้ปุ่มกดทำอะไร เทอรม์นิัล 1 ตัวของปุ่มกดควรต่อเข้ากับเทอร์มินัล 14 (ดิน) เทอร์มินัลอื่นๆของปุ่มกดควร ต่อเข้ากับเทอร์มินัล 15, 16, 17 ซึ่งพิจารณาตามหน้าที่การทำงานที่คุณต้องการ เทอร์มินัล 15 (CL) สำหรับการปิด เทอร์มินัล 16 สำหรับการเปิด เทอร์มินัล 17 สำหรับการหยุด
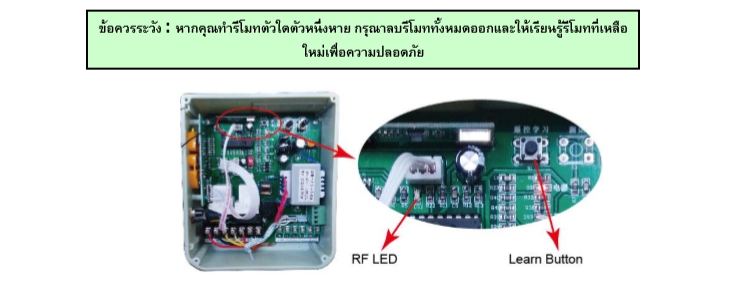
วิธีการเรียนรู้หรือลบรีโมท
การเรียนรู้ของรีโมท เปิดขึ้น ภายใน 5 วินาที กดปุ่ม Stop ค้างไว้ จนกว่าไฟ RF LED กระพริบ 4 ครั้ง หลังจากนั้นปิดเครื่อง ตอนนี้รีโมทเรยีนรู้การทำงานเรยีบร้อยแล้ว หมายเหตุ สามารถป้อนรีโมทได้สูงสุด 30 ตัวสำหรับ barrier การลดรีโมท เปิดเครื่อง Barrier กดปุ่ม Learn จนกว่าไฟ RF LED เปลยี่นจากเปดิเป็นปิด ตอนนรี้ีโมททุกตัวจะถูกลบออก
การตั้งค่าแผงควบคุม
- สวิทช์ DIP สวิทช์ DIP มีอยู่ 2 ตัวติดตั้งอยู่บนแผงควบคุม ถูกใช้เพื่อเปิดปิดการปิดอัตโนมัติของเครื่อง สวิทช์ทั้งสองควรตั้งเปิดการปดิอัตโนมัติ

คำเตือน โฟโตเซลล์ต้องติดตั้งบนเครื่อง เพื่อเป็นระบบป้องกันสำหรบัความปลอดภัย เมื่อฟังก์ชันการปิดอัตโนมัติถูกใช้งาน
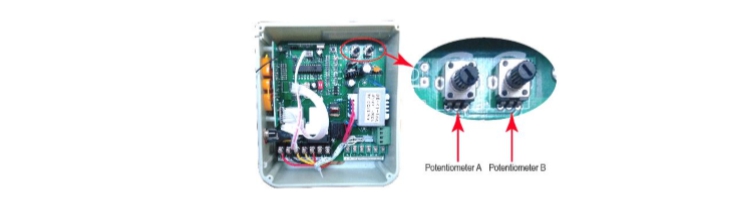
2. Potentiometers หรือปุ่ม Volume
ตัวติดตั้งบนแผงควบคุม ถูกใช้เพื่อปรับระยะเวลาการทำงานสูงสุดและเวลาปิดอัตโนมัติ potentiometer A ถูกใช้เพื่อปรับระยะเวลา การทำงานสูงสุดของเครื่อง potentiometer B ถูกใช้ เพื่อปรับเวลาที่ปิดการทำงานอัตโนมัติของเครื่อง ซึ่งทั้งสองตัวสามารถปรับได้ ตั้งแต่ 1 ถึง 12 วินาที
การซ่อมบำรุง
- ทำความสะอาดตัวเครื่องบ่อยครั้งเพื่อความสะอาด
- ตรวจสอบว่าน็อตสกรูทั้งหมดแน่นหนา 1 ครั้ง/เดือน
- หล่อลื่นอุปกรณ์ข้อต่อทั้งหมด ทุกๆ 3 เดือน เพื่อให้มีการหล่อลื่นที่ดี
- ตรวจสอบสปริงหลังจากใช้งานไปแล้ว 3,000 ครั้งและปรับแต่งเป็นครั้งคราวตามความเหมาะสม
- ให้ช่างผู้ชำนาญการตรวจสอบหาอุปกรณ์ที่สึกหรอทุกๆ 6 เดือนและเปลี่ยนตามความเหมาะสม
ข้อมูลเพิ่มเติม



RFID คืออะไร? ตอนที่ 1 ความรู้เบื้องต้นเกี่ยวกับ RFID
RFID ชื่อเต็มๆ ก็คือ Radio Frequency Identification หรือการระบุข้อมูลสิ่งต่างๆ โดยใช้คลื่นความถี่วิทยุ ซึ่งพวกเราทุกคนคงจะคุ้นเคยกับระบบนี้เป็นอย่าง ดี เพราะว่า RFID ถูกนำเข้ามาใช้ในชีวิตประจำวันของเราอย่างหลากหลาย เพียงแต่ว่าเราจะรู้หรือไม่เท่านั้นเองว่าสิ่งเหล่านั้นใช้เทคโนโลยี RFID
ผมเชื่อว่าทุกๆ ท่านคงจะเคยไปเดินซุปเปอร์มาร์เก็ตตามห้างสรรพสินค้าทั่วไป ซึ่งตรงทางเข้าหรือทางออก เราจะต้องเดินผ่านเครื่องอ่านประเภทให้คนเดินผ่าน ซึ่งก็คือ หนึ่งในเทคโนโลยี RFID ที่ถูกนำมาใช้เพื่อป้องกันการขโมยสินค้า หลักการคือ จะติดป้าย) ศัพท์ทาง RFID เรียกว่า Tag) ไว้กับสินค้าที่ต้องการ Detect ซึ่งในเวลาซื้อปกติ ทาง พนักงานจะดึงป้ายนี้ออก หรืออาจจะมีการเปลี่ยนแปลงข้อมูลที่ป้าย เพื่อจะไม่ให้เกิดเสียงดังเวลาที่ผ่านเครื่องอ่าน ในกรณีที่มีการขโมยสินค้า ตัวป้ายนี้จะยังอยู่ติดกับตัวสินค้า เมื่อผ่านเครื่องอ่าน เครื่องจะส่งเสียงดังให้ทราบ
อีกตัวอย่างหนึ่งนะครับ สำหรับท่านที่นิยมใช้รถไฟฟ้าใต้ดิน ตั๋วของรถไฟฟ้าใต้ดิน ที่มีลักษณะกลมๆ สีดำ เวลาเราจะเดินผ่านด่านเข้าไป เราก็เพียงนำเหรียญนี้ แตะไป ตรงบริเวณที่อ่านบัตร จากนั้นทกี่ั้นก็จะเปิด ซึ่งเหรียญกลมๆ สีดำนั้น จริงๆ แล้วก็คือ RFID ประเภท Tag โดยที่ด้านในจะมีตัวชิปและขดลวดที่ทำหน้าที่เป็นเสาอากาศเพื่อส่ง สัญญาณอยู่นะครับ หวังว่าผู้อ่านทกุท่านคงจะนึกภาพเกี่ยวกับ เทคโนโลยี RFID กันพอสมควรแล้วนะครับ ต่อไปเราจะลองมาดูกันนะครับว่าในระบบพื้นฐานของ RFID นั้นจะ ประกอบด้วยอะไรบ้าง
ในระบบ RFID จะมีองค์ประกอบหลักๆ ด้วยกัน 3 ส่วน คือ
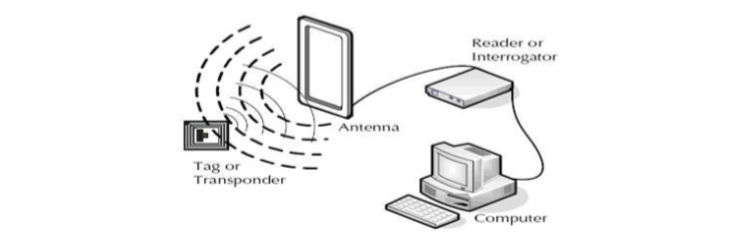
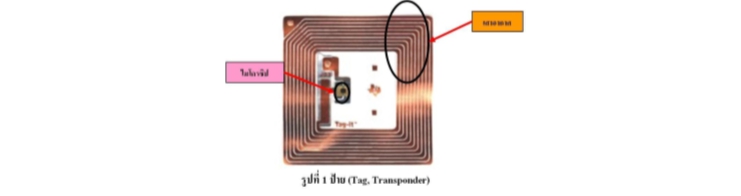
1. ป้าย (Tag, Transponder)
2. เครื่องอ่านป้าย (Reader, Interrogator)
3. ฮาร์ดแวร์ หรือ ระบบที่ใช้ประมวลผล
4. ป้าย (Tag, Transponder) มาดูที่ส่วนแรกกันเลยนะครับ
ป้าย (Tag, Transponder [transceiver-responder]) ดังที่ได้ยกตัวอ่ย่าง ป้าย Tag ที่ติดสินค้ากันขโมย และตั๋วรถไฟฟ้าที่เป็นเหรียญ กลมๆ สีดำไปแล้วนะครับ สิ่งเหล่านี้ก็คือ Tag ซึ่งโดยทั่วไปแล้ว ภายในจะประกอบด้วย เสาอากาศ และตัวไมโครชิป ในส่วนของตัวเสาอากาศนั้น จะทำหน้าที่รับส่งสัญญาณ คลื่นวิทยุระหว่าง ป้าย Tag กับเครื่องอ่าน Reader นอกจากนั้นแล้วยังสามารถทำหน้าที่สร้างพลังงาน เพื่อป้อนให้กบัไมโครชิปได้อีกด้วย
ประเภทของป้ายอาร์เอฟไอดี (RFID)
RFID ชนิด Passive ป้ายชนิดนี้ทำงานได้ โดยไม่จำเป็นต้องใช้แหล่งจ่ายไฟจากภายนอก เพราะภายในบัตรมีวงจรกำเนิดไฟฟ้าเหนี่ยวนำ เป็นแหล่ง พลังงานในตัวอยู่แล้ว ระยะการอ่านข้อมูลได้ในระยะสั้นๆ เท่านั้นไม่เกิน 1 เมตร (ขึ้นอยู่กับกำลังส่งของเครื่องอ่านและความถี่วิทยุที่ใช้) RFID ประเภทนี้มีขนาดเล็กและน้ำหนักเบา
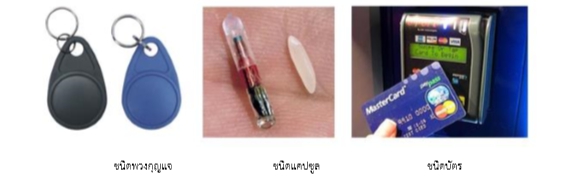
2. RFID ชนิด Active ป้ายชนิดนี้ต้องอาศัยแหล่งจ่ายไฟจากภายนอก เพื่อจ่ายไฟให้วงจรทำงาน ระยะการอ่านข้อมูลได้ประมาณ 100 เมตร แต่มีข้อเสีย คือ ขนาดของป้ายหรือเครื่องอ่านมีขนาดใหญ่ อายุแบตเตอรี่มีอายุการใช้งานประมาณ 3-7 ปี

นอกจากนั้นยังสามารถจัดรปูแบบป้าย RFID จากรูปแบบการอ่านเขยีน มีอยู่ 3 รูปแบบดังนี้
- ป้ายที่ใช้อ่านและเขียนขอ้มูลลงไปได้หลายๆครั้ง (Read-Write)
- ป้ายที่ใช้เขียนได้เพียงครั้งเดียวแต่อ่านได้หลายครั้ง (Write-once Read-many)
- ป้ายที่ใช้อ่านได้เพียงอย่างเดียว (Read-only)
2. เครื่องอ่านป้าย (Reader, Interrogator) โดยหน้าที่ของเครื่องอ่านป้ายคือ จะทำการเชื่อมต่อกับป้ายเพื่อทำการอ่านหรือเขียนข้อมูลลงในป้าย โดยใช้สัญญาณวิทยุ ซึ่งภายในเครื่องอ่านจะประกอบด้วย เสา อากาศ เพื่อใช้รับ ส่งสัญญาณ, ภาครับ ภาคส่งสัญญาณวิทยุ, วงจรควบคุมการอ่าน เขียนข้อมูล
จะมีชนิด และลักษณะรูปร่างหลากหลายแตกต่างกันไป ขึ้นอยู่กับลักษณะการใช้งาน เช่น แบบมือถือ, แบบติดหนัง จนไปถึงแบบขนาดใหญ่เท่าประตู ลองดูตัวอย่างจากรูป ข้างล่างดูนะครับ

3. ฮารด์แวร์ หรือ ระบบที่ใช้ประมวลผล มาถึงในส่วนสุดท้าย คือ ส่วนฮาร์ดแวร์ หรือระบบที่ใช้ประมวลผล เปน็ส่วนที่จะทำการประมวลผลข้อมูลที่ได้มาจากป้าย (Tag) หรือจะสร้างข้อมูลเพื่อส่งไปยังป้าย (Tag) หรือว่าจะเป็นที่เก็บระบบฐานข้อมูล ทั้งนี้ขึ้นอยู่กับระบบที่เรานำเอาไปใช้นะครับ ตัวอย่างอย่างเช่น ระบบการจดัการฟาร์มปศุสัตว์, ระบบคลังสินค้า, ระบบขนส่ง, ระบบ การบริหารจัดการทรัพยากรต่างๆ เป็นต้น












เนื้อหาที่เกี่ยวข้อง
")
คู่มือการใช้งาน ประตูรีโมท (บานเลื่อน)
1 ก.ค. 2562

คู่มือการใช้งาน โปรแกรมระบบวีแกน
1 ก.ค. 2562
")
คู่มือการใช้งาน ประตูรีโมท (บานสวิง)
1 ก.ค. 2562

เครื่องสแกนใบหน้า HAC-CT35000L-AI AI Dynamic Face
10 ก.พ. 2567